Why Does FMCW LiDAR Require Ultra-Narrow Linewidth Lasers?
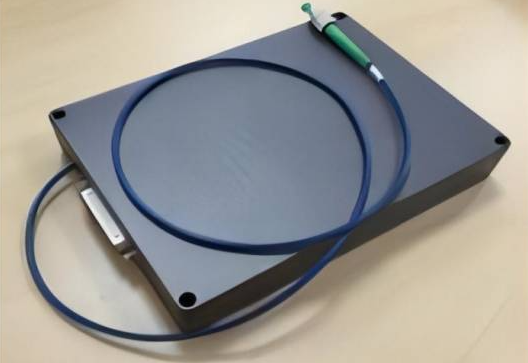
Frequency Modulated Continuous Wave LiDAR (FMCW LiDAR) is moving from the laboratory to practical applications, such as autonomous driving, robotics, and industrial metrology, etc. Compared with Time of Flight (ToF) LiDAR, FMCW LiDAR has two core advantages in practical applications: direct speed measurement and stronger resistance to environmental light interference.
However, these advantages can only be exerted when the light source is sufficiently stable. In fact, the limiting factor is often not power or wavelength, but the laser linewidth.

What Is FMCW LiDAR?
The working principle of FMCW LiDAR is based on coherent mixing rather than pulse timing.
The simplified workflow is as follows:
- The laser emits a continuous chirped signal.
- Some of the signals are sent to the target.
- The reflected signal returns with a delay and Doppler frequency shift.
- The local laser acts as a reference source (LO).
- The two signals are mixed on the photodetector.
- The beat frequency is generated and processed.
Through this process, two physical quantities can be extracted:
- Distance (calculated based on the frequency difference caused by time delay)
- Speed (calculated based on Doppler frequency shift)
Unlike the Time-of-Flight (ToF) system, FMCW does not directly measure the time. Instead, it measures the stability of the frequency changes over time. This is the key point.
Why Linewidth Matters in FMCW LiDAR?
The linewidth of a laser represents the spectral width of the emitted light signal. In fact, it reflects the stability of the laser frequency over time.
The narrowness of the line width indicates that the laser maintains a stable phase. A wide line width means that due to phase noise, the optical frequency will continuously drift.
In frequency-modulated continuous-wave lidar (FMCW LiDAR), this directly affects the interference process. If the phase stability is poor, the beat frequency signal will become unstable, and the frequency extraction will also become unreliable.
This is not a minor effect. The entire measurement principle relies on stable interference.
How Does Laser Linewidth Affect FMCW LiDAR Performance?
Range Resolution
The range resolution of FMCW LiDAR depends on the clarity of the separation between different frequencies. When the linewidth is large, the phase noise will broaden the spectrum, making the peak less distinct.
When using narrow linewidth lasers, the beat frequency signal becomes sharper and more stable. At this point, the system can more reliably distinguish objects at close distances, especially in dense environments such as urban driving.
Maximum Detection Distance
As the distance increases, the reflected light signal will weaken. At this point, the system performance largely depends on the coherence between the transmitted signal and the received signal.
Narrow-linewidth lasers can maintain phase coherence over a greater distance, even when the echo power is low, and can ensure the integrity of the signal. On the contrary, a wider linewidth will shorten the coherence length, causing weak signals to be masked by noise more quickly.
This is precisely the main reason why the remote frequency-modulated continuous-wave laser radar system prefers an ultra-stable laser source over just a simple optical power source.
Velocity Measurement Accuracy
The FMCW laser radar can extract speed information by analyzing the frequency shift caused by the Doppler effect. These frequency shifts are usually very small, especially for objects moving at a slow speed.
If the laser linewidth is wide, the intrinsic frequency noise may be comparable to or even greater than the Doppler frequency shift. This will introduce uncertainty in the velocity estimation and may cause the tracking results to fluctuate.
The narrow-linewidth laser reduces this uncertainty by stabilizing the optical carrier frequency, thereby enabling more reliable speed measurement under different operating conditions.
Multi-Target Detection Capability
In actual application scenarios, it is rare to encounter only a single reflection. Usually, multiple objects will generate overlapping frequency-shifted signals within the same observation window.
When the line width is large, the spectral broadening will make it difficult to separate these overlapping components. The peaks will merge, and the weaker reflected signals may be drowned out in the noise background.
Narrow-linewidth light sources can produce clearer spectra and more distinct peaks, thereby enhancing the system’s ability to distinguish multiple targets in complex environments such as highways, intersections, or industrial areas.
What Laser Specifications Should Engineers Consider?
Recommended Linewidth for Different Applications
In the actual design of FMCW LiDAR, the selection of line width depends on the requirements of your application and there is no fixed standard.
| Application | Typical Linewidth | System Requirement |
| Short-range sensing | <1 MHz | Basic ranging |
| Industrial LiDAR | <100 kHz | Stable detection |
| Automotive FMCW LiDAR | <10 kHz | High accuracy + reliability |
| High-end research systems | <1 kHz | Maximum coherence performance |
In many engineering designs, when the line width reaches the order of several tens of kilohertz, a significant performance improvement can be achieved, especially in long-distance and high-speed application scenarios.
Other Important Parameters
Although linewidth is critical, FMCW LiDAR performance depends on multiple laser characteristics. Engineers typically evaluate them together during system design.
- Frequency stability under temperature variation
- Relative intensity noise (RIN), which affects signal-to-noise ratio
- Chirp linearity, which impacts ranging accuracy
- Output power, which determines detection range
- Long-term reliability, especially in automotive environments
Among these, linewidth and phase noise are most directly linked to coherent detection quality.
Final
The FMCW laser radar relies on coherent detection rather than time-of-flight measurement. Therefore, the system performance directly depends on the stability of the laser phase.
The laser linewidth determines the stability of the phase relationship. It affects the coherence length, the quality of the beat frequency signal, and the accuracy of distance and speed extraction.
In fact, a wider linewidth leads to faster coherent attenuation and lower measurement reliability, especially in long-distance or multi-target scenarios.
Therefore, an ultra-narrow linewidth laser is a core requirement for the design of FMCW laser radar, rather than just a performance enhancement issue.